Conceitos Essenciais de Motores e Diretrizes para Seleção
Table of Contents
Conceitos Essenciais de Motores e Diretrizes para Seleção #
Este guia fornece uma visão clara da terminologia fundamental de motores e métodos práticos de cálculo, apoiando decisões informadas na seleção de motores e redutores de velocidade para diversas aplicações.
Terminologia de Motor #
Classificação #
A classificação define os limites operacionais de um motor, incluindo potência de saída, tensão, corrente, frequência, torque e rpm. Quanto à elevação de temperatura, as classificações são categorizadas como contínuas ou de curto período.
RPM Síncrono #
A velocidade síncrona de um motor é determinada pela sua frequência e pelo número de polos. A fórmula é:
- Ns = (120 × f) / P
- Ns: rpm síncrono (rotações por minuto)
- 120: Constante
- f: Frequência
- P: Número de polos
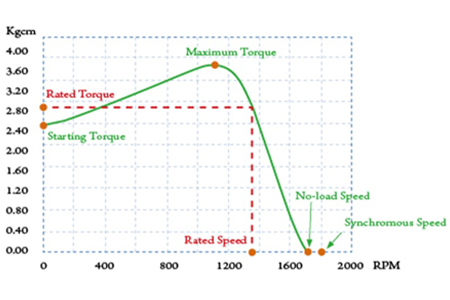
Torque Nominal #
O torque nominal é o torque produzido pelo motor em seu rpm nominal.
RPM sem Carga #
Este é o rpm do motor quando opera sem nenhuma carga.
Classificações Contínua e de Curto Período #
- Classificação contínua: O motor opera continuamente em sua potência nominal.
- Classificação de curto período: O motor funciona na potência nominal por um período limitado e especificado.
Potência de Saída #
A potência de saída indica o trabalho que um motor pode realizar por unidade de tempo, determinada pelo rpm e torque. A fórmula é:
- Potência (kW) = (T × N) / 97400
- T: Torque (Kgcm)
- N: RPM
- 1 HP = 0,746 kW
Torque de Partida #
O torque de partida é o torque instantâneo gerado quando o motor inicia. Se a carga exceder esse valor, o motor não irá partir.
Escorregamento #
O escorregamento é uma medida da diferença entre o rpm síncrono e o rpm real:
- S = (Ns - N) / Ns
- S: Escorregamento
- Ns: rpm síncrono
- N: rpm real sob carga
Seleção e Cálculo do Motor #
Visão Geral da Série de Redutores de Velocidade #
Cálculo da Relação de Redução #
Selecione a relação de redução adequada para combinar o rpm de saída do redutor com os requisitos da máquina operante:
- i = Nm / Ng ou 1 / i = Ng / Nm
- i: Relação de engrenagem
- Ng: Velocidade de saída do redutor (rpm)
- Nm: Velocidade de funcionamento do motor (rpm)
Cálculo de Torque para Redutor de Velocidade com Ligação Direta #
Escolha o modelo que corresponda ao torque de saída requerido:
- Tg = Tm × i × η
- Tg: Torque de saída do redutor
- Tm: Torque de saída do motor
- i: Relação
- η: Eficiência de transmissão do redutor de velocidade
Torque Máximo Permitido #
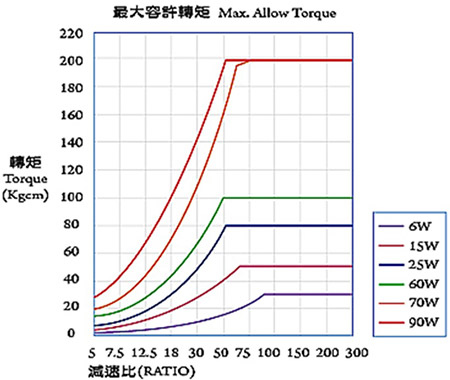
O torque de saída de um redutor de velocidade é limitado pela qualidade e design estrutural da caixa de engrenagens, especialmente em relações de redução mais altas. Cada modelo possui um torque máximo permitido, conforme ilustrado acima.
Cálculos Básicos de Capacidade do Motor #
Fórmula Geral #
- Pg = (P1 + P2 + P3) × 100 / η [W]
- P1 = 9,8 × μ × W × V × λ [W]
- P2 = (μ × Q × λ) / 367 [W]
- P3 = ± (Q × H) / 367 [W]
- λ: Comprimento da correia (distância entre eixos, m)
- W: Peso por unidade de comprimento da correia (kg/m)
- μ: Coeficiente de atrito
- V: Velocidade da correia (m/seg)
- Q: Volume de transporte (kg/h)
- η: Eficiência (%)
- H: Diferença de altura entre as extremidades do transportador (m)
Aplicações de Carga de Elevação #
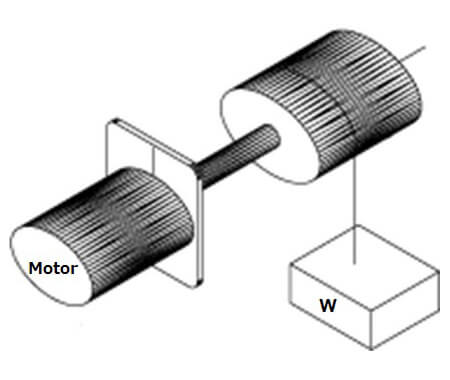
- Pg = (W × V) / (6 × 12) × (100/η) [W]
Acionamento de Corpo Inercial #
- Pg = 1,027 × N × T [W]
- T ≈ (GD² / 375) × (N / t) [kgf × m]
- N: Rotações por minuto (rpm)
- T: Torque (kgf × m)
- GD²: Efeito volante (kgf × m²), incluindo rotor
- t: Tempo de partida (seg)
Movimento em Nível sobre Superfície de Contato #
- Pg = (μ × W × V) / (6 × 12) [W]
Para mais assistência ou informações detalhadas sobre produtos, consulte a seção de Suporte Tecnológico ou entre em contato com nossa equipe.