基本的なモーターの概念と選定ガイドライン
目次
基本的なモーターの概念と選定ガイドライン #
本ガイドは、基本的なモーター用語と実用的な計算方法を明確に解説し、多様な用途におけるモーターおよび減速機の選定を支援します。
モーター用語 #
定格 #
定格は、モーターの動作限界を示し、出力、電圧、電流、周波数、トルク、回転数を含みます。温度上昇に関しては、連続定格と短時間定格に分類されます。
同期回転数 #
モーターの同期速度は周波数と極数によって決まります。計算式は以下の通りです:
- Ns = (120 × f) / P
- Ns:同期回転数(毎分回転数)
- 120:定数
- f:周波数
- P:極数
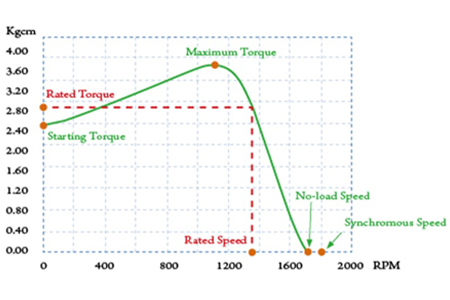
定格トルク #
定格トルクは、モーターが定格回転数で発生するトルクです。
無負荷回転数 #
負荷がかかっていない状態でのモーターの回転数です。
連続定格と短時間定格 #
- 連続定格:モーターが定格出力で連続運転すること。
- 短時間定格:モーターが定格出力で一定の短時間のみ運転すること。
出力 #
出力は、モーターが単位時間あたりに行う仕事量を示し、回転数とトルクで決まります。計算式は以下の通りです:
- 出力 (kW) = (T × N) / 97400
- T:トルク(Kgcm)
- N:回転数(rpm)
- 1 HP = 0.746 kW
始動トルク #
始動トルクは、モーターが始動時に瞬間的に発生するトルクです。負荷がこの値を超えるとモーターは始動しません。
スリップ #
スリップは、同期回転数と実際の回転数の差を示します:
- S = (Ns - N) / Ns
- S:スリップ
- Ns:同期回転数
- N:負荷時の実回転数
モーター選定と計算 #
減速機シリーズ概要 #
減速比の計算 #
減速機の出力回転数を使用機械の要求に合わせるため、適切な減速比を選択します:
- i = Nm / Ng または 1 / i = Ng / Nm
- i:減速比
- Ng:減速機出力回転数(rpm)
- Nm:モーター回転数(rpm)
直結減速機のトルク計算 #
必要な出力トルクに合うモデルを選択します:
- Tg = Tm × i × η
- Tg:減速機出力トルク
- Tm:モーター出力トルク
- i:減速比
- η:減速機伝達効率
最大許容トルク #
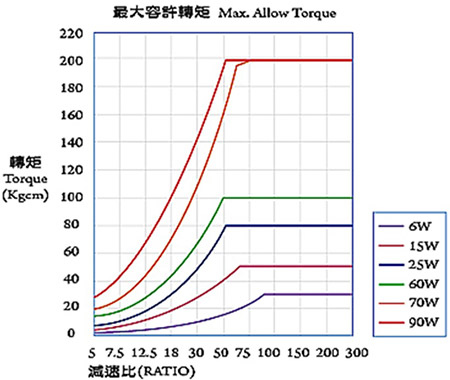
減速機の出力トルクは、ギアボックスの品質と構造設計によって制限され、特に高減速比の場合に影響します。各モデルには最大許容トルクがあり、上図の通りです。
基本的なモーター容量計算 #
一般計算式 #
- Pg = (P1 + P2 + P3) × 100 / η [W]
- P1 = 9.8 × μ × W × V × λ [W]
- P2 = (μ × Q × λ) / 367 [W]
- P3 = ± (Q × H) / 367 [W]
- λ:コンベヤ長さ(軸間距離、m)
- W:ベルト単位長さあたりの重量(kg/m)
- μ:摩擦係数
- V:ベルト速度(m/sec)
- Q:搬送量(kg/h)
- η:効率(%)
- H:コンベヤ端間の高さ差(m)
荷揚げ用途 #
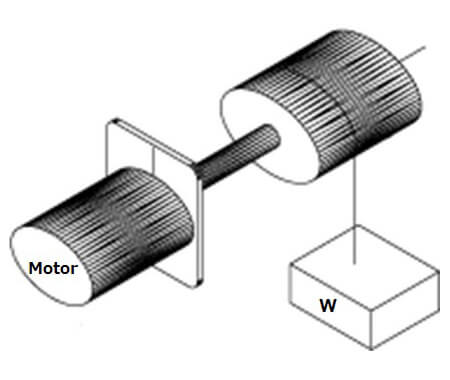
- Pg = (W × V) / (6 × 12) × (100/η) [W]
慣性体駆動 #
- Pg = 1.027 × N × T [W]
- T ≈ (GD² / 375) × (N / t) [kgf × m]
- N:回転数(rpm)
- T:トルク(kgf × m)
- GD²:フライホイール効果(kgf × m²)、ローター含む
- t:始動時間(秒)
接触面上の水平移動 #
- Pg = (μ × W × V) / (6 × 12) [W]
詳細な製品情報やさらなるサポートについては、技術サポートをご参照いただくか、当社チームまでお問い合わせください。